大家好!今天给各位分享几个有关智能寻线小车的知识,其中也会对智能寻车功能怎么用啊?进行解释,如果能碰巧解决你现在面临的问题,别忘了关注本站,现在开始吧!
本篇目录:
智能巡线小车意义
智能交通:随着社会的发展和科技的进步,智能交通系统已经成为城市交通管理的重要组成部分。
-图1")
实现自动寻迹等。基于单片机的循迹避障小车的设计与实现官网显示,设计意义为通过配合软件编程,可以很好的实现自动寻迹、避障的功能。
国内外对巡线小车的研究现状:随着汽车电子技术的发展,汽车的车身控制和动力控制纷纷应用了各类的传感器。其中光电传感器进入汽车领域的时间虽然比较晚,但也被广泛应用的在汽车控制方面的各个领域。
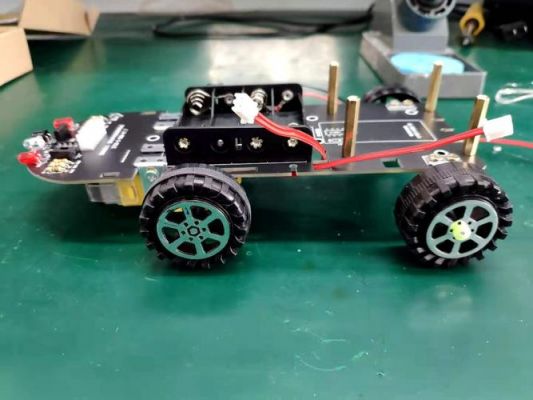
小车巡线是指由单片机控制的,可以修改程序的,在程序的控制下,能够自由移动,自动完成特定功能的小车,它可以集计算机技术,软件编程,自动控制,传感器技术,机械结构于一体,是学习信息技术,机器人的最佳载体。
-图2")
智能巡线小车方案
1、agv小车完成自主巡线功能主要如下几种方案:直接坐标(CartesianGuidance)用定位块将AGV的行驶区域分成若干坐标小区域,通过对小区域的计数实现导引。
2、让小车在如下形状的跑道上一圈一圈巡线,一边巡线一边在控制器中建构跑道,来改变电机的控制策略,达到每一圈巡线的速度比上一圈快的效果。电机选型四个轮子分别用四个步进电机驱动。
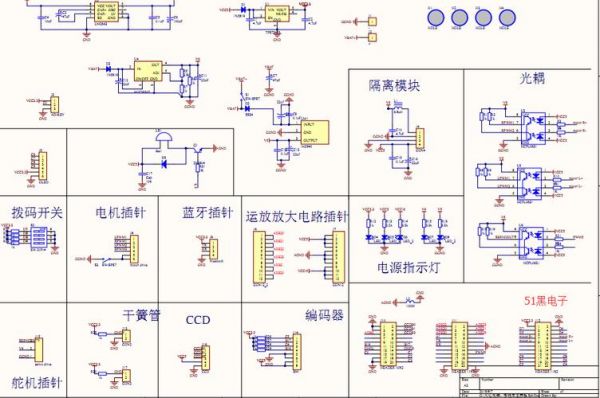
3、利用下面传感器检测前方地面的颜色,然后作出调整转弯,保持一直行驶在黑线上。就像开车一样,调整方向盘使其不偏离车道。原理:巡线小车寻迹电路采用红外光电传感器进行检测并且寻迹运动。
-图3")
4、设计出一个能够识别并沿着以白底为道路色,宽度5mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹行进的智能寻迹机器小车。
5、第一类为CCD寻迹,这种类型的小车是通过在小车上架起一个两方向云台,可以实现左右转动的CCD摄像机,应用图像识别系统对跑道加以识别和检测,从而为小车提供运动依据。
6、循迹系统牵引力控制系统,简称TCS。它的作用是使汽车在各种行驶状况下都能获得最佳的牵引力。防抱死刹车系统,是一种具有防滑、防锁死等优点的汽车安全控制系统。
agv小车完成自主巡线功能主要有哪些方案
1、(3)磁条导航。磁条导航这种方式和电磁导航比较类似,只是把导引线换成磁条,在两个探测线圈之外多加了一个激励线圈。因为磁条的磁场是不变的,探测线圈中不能自动感应出电压。(4)激光导航。
2、电磁感应引导 利用低频引导电缆形成的电磁场及电磁传感装置引导无人搬运车的运行。激光引导 利用激光扫描器识别设置在其活动范围内的若干个定位标志来确定其坐标位置,从而引导AGV运行。
3、AGV舵轮驱动有四种方式:单驱动 用于三轮车型:一个驱动兼转向轮,两个固定从动轮(分布在车体轴线的两边)。这种车型可以前进、后退、左右转弯(转角小于90°)。
4、小车地址设置:选择按钮,当按下确认键之后,就可以进入设置界面,让AGV控制软件支持更多的功能,不需要设置就自行可以运作。
5、AGV是装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的转运车。
d21型巡线小车工作原理
巡线小车的巡线原理是利用光线传感器检测前方的地面颜色,然后做出调整,保持一直行驶在黑线上就像开车一样,是通过控制方向盘来调整保持车不偏离道路的。
还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,通过动手实践能大大提高解决实际问题的能力,制作完成后的产品,能沿预定的轨道自动前进,生动、有趣,深受初学者喜爱。
第一类为CCD寻迹,这种类型的小车是通过在小车上架起一个两方向云台,可以实现左右转动的CCD摄像机,应用图像识别系统对跑道加以识别和检测,从而为小车提供运动依据。
到此,以上就是小编对于智能寻车功能怎么用啊?的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏