大家好!今天给各位分享几个有关机器人主控芯片的知识,其中也会对机器人主控芯片mcu进行解释,如果能碰巧解决你现在面临的问题,别忘了关注本站,现在开始吧!
本篇目录:
- 1、扫地机器人是什么芯片控制的
- 2、高速脉冲输出指令在自动生产线中的作用?
- 3、川崎机器人非法的控制结构报警怎么处理
- 4、智能语音产品的本地唤醒对主控芯片的算力要求大概是咋样的?
- 5、智能机器人的电控点火系统是怎样构造的?
- 6、89c51主控芯片的选择
扫地机器人是什么芯片控制的
1、主控制芯片主要用来做上层应用。 包括操作系统及语音,视觉,UI界面交互都是由主控芯片管理,例如小米扫地机器人使用的Allwinner ARM Cortel-A7架构的四核处理器。微控制器主要用来进行路径规划。
-图1")
2、一:科沃斯扫地机器人DT85朵朵,最大特色是增加了智控的概念,用户可通过APP定时监控定制个性化清洁服务,内置ICS芯片,WiFi连接操控你的地宝。
3、小米扫地机器人的工作原理是什么?清扫机器人小米采用激光传感器模式的规划导航和SLAM算法,清扫机器人小米采用Allwinner arm的Allwinner主处理器。微控制器主要用于课程规划。运行slam导航算法建立虚拟三维房间。
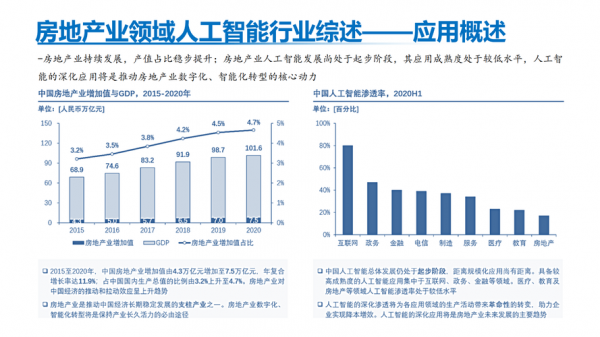
4、科沃斯机器人作为全球最早的服务机器人研发与生产商之一,专注于服务机器人的独立研发、设计、制造和销售。
-图2")
5、清洁效果再升级。价格上的区别:不同型号的科沃斯机器人由于造工、性能、功能上的差异,会导致其机器人的价格有所不同。如科沃斯地宝灵犀为扫地机器人的最高性价比,该款机器人十分适合初次体验扫地机器人的消费者。
高速脉冲输出指令在自动生产线中的作用?
脉冲输出指令则用于产生指定数量的脉冲信号,通过设置脉冲输出元件号、占空比和输出方式等参数,实现对工业过程的精确控制和高效运行。这两种指令在工业自动化领域中起到重要的作用,能够提高生产效率和质量。
对应可接受脉冲的元器件例如:步进放大器,伺服放大器等,输出到达元件后可使之对应驱动等做相对应的精度移动或做功。
-图3")
高速脉冲一般是用于控制步进电机或伺服电机 望采纳。。
另一种是高速脉冲输出,用于步进电机,伺服电机的控制输出的脉冲频率很快的脉冲输出,比如PLSY,PLSR等指令。
脉冲输出可以看成一个上升沿和一个下降沿,楼上说的控制电机是很常见的一种情况,真正理解脉冲输出的含义,可以更灵活的使用脉冲输出,在编程时可以达到更灵活的效果。
川崎机器人非法的控制结构报警怎么处理
1、川崎机器人E1130报警是编码器线接线错误、电机编码器故障、驱动器硬件故障。
2、川崎机器人外部保持怎么取消这个可以打开川崎机器人的自带电脑,然后点击打开以后把外部保持点击取消就可以喽。安全模式选择:选择主菜单的“系统信息”,然后选择“安全模式”,显示安全模式的选择对话框。
3、关机,断电,再启动。根据查询机床报警的相关资料显示,如果由于输入非法指令导致机床报警,应该关机,断电,再启动。
4、先做好数据备份后找技术人员处理。川崎机器人故障报警代码维修排除方法:重点检查故障代码D1028和1562,找到故障信息手册中D1028;川崎机器人故障报警代码维修排除方法:有信息基本可以判断为AVR稳定电源电压问题。
5、检查触摸屏的连接是否正常,检查接线是否松动或损坏,有则重新连接或更换接线。确认报警信息是否已经被清除,若未被清除需要重新触发故障再次显示报警信息。
6、解除方法如下:首先需要停止机器人的运行,将机器人移动到安全位置,关闭机器人电源。检查机器人的各个部件是否松动或者损坏,特别是机器人的关节和传感器部件。
智能语音产品的本地唤醒对主控芯片的算力要求大概是咋样的?
1、可穿戴设备、智能门锁、TWS耳机等功能的需求提升了对算力的要求,比如TWS耳机有唤醒、降噪、语音识别的功能,智能门锁有指纹识别的功能,现在的智能手表也有更高的交互功能。
2、当下的物联网对芯片的算力要求较低,去年51亿智能音箱销量中,有五成是联发科旗下的芯片;三星也曾提出过利用旧手机的芯片和传感器,将旧手机变成物联网设备。
3、ASIC是指应特定用户要求或特定电子系统的需要而设计、制造的集成电路。严格意义上来讲,ASIC是一种专用芯片,与传统的通用芯片有一定的差异。是为了某种特定的需求而专门定制的芯片。
智能机器人的电控点火系统是怎样构造的?
1、电控独立点火系统主要由以下组件组成:蓄电池(Battery):提供电力供应,为整个系统提供起动能量和电源。发电机(Generator):通过机械能转换成电能,为电子系统和充电电路供电,同时充电蓄电池。
2、电源:一般由蓄电池和发电机共同组成,主要是给点火系统提供所需的电能。传感器:用于检测发动机各种运行参数,为ECU提供点火控制所需的信号。ECU:是电控点火系统的中枢。点火器:电控点火的执行元件。
3、电控发动机点火系统由电源、传感器、ECU、点火器、点火线圈、分电器、火花塞组成;电子控制点火系统ESA最基本的功能是点火提前控制。
4、组成点火系统由蓄电池、点火开关、点火线圈、点火控制模块、高压线、火花塞等组成。
89c51主控芯片的选择
C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS8位微处理器,俗称单片机。单片机的可擦除只读存储器可以反复擦除1000次。
选择Atmel公司旗下的AT89C51芯片,点击图中红色区域位置“确定”选项。
C51和89S51内核相同,89S51针对89C51的明显的几个升级如下;1.程序存储器写入方式:二者的写入程序的方式不同,89C51只支持并行写入,同时需要VPP烧写高压。
CPU(Central Processing Unit,中央处理器):控制整个系统的运行,执行指令和算术逻辑运算。 内存:包括程序存储器(包含程序代码)和数据存储器(存储变量、数据等)。
用NE5532或者TL082吧,TL072也行。这些都是双运放,四运放也可以使用TL08TL074。
C51属于可编程可擦写单片机,应用的范围很广,性能可靠,易于掌握,价格合理,通用性强!可用于诸如自动化控制设备,计数运算,生产安全监控控制等等。。
到此,以上就是小编对于机器人主控芯片mcu的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏